TTP/C ist ein zeitgesteuertes Kommunikationsprotokoll,
das speziell für den Einsatz in sicherheitskritischen Anwendungen, wie z.B.
im Flugzeugbereich oder für X-by-Wire-Anwendungen im Automobil geeignet ist.
Mit diesem Protokoll können die höchsten Sicherheitsanforderungen erfüllt werden.
Zudem wird es mit diesem Protokoll möglich, Komponenten eines Systems einzeln
zu entwickeln und zu testen, und dann zusammenzufügen.
Das Protokoll arbeitet nach dem TDMA-Verfahren.
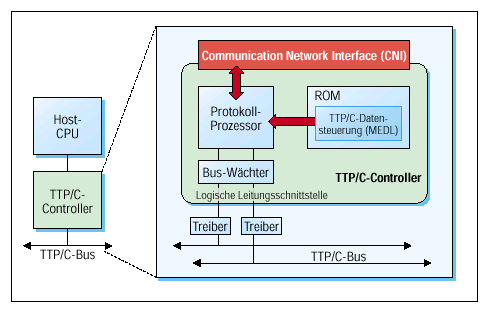
Die Kommunikation des Hostprozessors mit dem Bus findet ausschließlich über
den TTP/C-Communication-Controller (Abb.
6‑19 : Überblick über einen Knoten [4]
) statt. Im Gegensatz zu klassischen, ereignisgesteuerten Bussystemen
wie z.B. CAN, kommunizieren beim TTP-Protokoll alle angeschlossenen Knoten ununterbrochen
in vordefinierten Zeitabständen.
Abb.
6‑19 : Überblick über
einen Knoten [4]
Während der Initialisierungsphase werden die
notwendigen Kontrollinformationen in der lokalen Message Descriptor List
(MEDL) des Controllers gespeichert [6]. Somit kann der TTP/C-Controller
nach der Initialisierungsphase völlig selbständig arbeiten, ohne Kontrollsignale
vom Host zu erhalten.
·
für zu sendende Nachrichten ist der Sendezeitpunkt
(Sendeinstanz) und die Adresse in der CNI enthalten, wo die Daten abgeholt werden
müssen.
Alle Aktionen, die in dem System durchgeführt
werden sollen, sind in der MEDL gespeichert. In der MEDL ist sogar gespeichert,
wann welche Daten zu senden sind. Für unterschiedliche Modi gibt es dabei auch
verschiedene MEDLs.
Um den richtigen Sendezeitpunkt ermitteln zu
können, ist eine verteilte Zeitbasis mit regelmäßiger Uhrensynchronisation notwendig.
Statt eines Busmasters für die Zeitsynchronisation wird ein dezentraler Algorithmus
verwendet. Der TTP/C-Controller führt diese Uhrensynchronisation autonom durch.
Um die benötigte Genauigkeit der Zeitbasis zu erreichen, werden die bekannten
Sendezeiten aus der MEDL verwendet. Da jeder Busteilnehmer weiß, wann er Nachrichten
empfangen soll, kann er ein Empfangsfenster um diesen Zeitraum spannen. Aus
der Differenz von erwartetem und tatsächlichem Empfangszeitpunkt kann die für
die Generierung der Zeitbasis notwendige Korrektur errechnet werden.
Beim Hochfahren des Systems gibt es noch keine
globale Zeit, da nicht alle Knoten zur selben Zeit aktiv sind. Jedem Knoten
ist eine bestimmte Zeit bis zum Time-out in der MEDL zugewiesen worden. Auf
dem Bus findet zunächst keine Kommunikation statt, bis bei dem ersten Knoten
ein Time-out gemeldet wird. Dieser Knoten startet dann die Kommunikation durch
Senden eines I-Frames. Die Startphase ist der einzige Zeitpunkt, in den Kollisionen
auf dem Bus auftreten können [5].
Es gibt zwei verschiedene Arten von Frames:
Den I-Frame, der zur Initialisierung und Resynchronisation von Controllern verwendet
wird, und den N-Frame zum Senden der Daten.
Abb. 6‑20 : I-Frame nach [3]
Abb. 6‑21: C-State nach [3]
Abb. 6‑22: N-Frame nach [3]
Eine TDMA-Round besteht aus so vielen Zeitslots,
wie SRUs im System vorhanden sind. Während des einer SRU zugewiesenen Zeitslots
kann die SRU die geforderten Daten senden. Im System beinhaltet ein Cluster-Cycle
alle zu sendenden Nachrichten.
Abb. 6‑23: Aufteilung eines Cluster Cycle in TDMA
Rounds und SRU Slots nach [3]
Das CNI ist die Kommunikationsschnittstelle
zwischen dem TTP/C-Controller und dem Hostprozessor. Es handelt sich dabei um
eine reine Datenschnittstelle, über die keine Steuersignale gesendet werden:
sie wirkt wie eine „temporäre Firewall“ [1]. Der Hostprozessor hat keine Möglichkeit,
das zeitliche Verhalten des Kommunikationssystems zu beeinflussen.
Der Buszugriff erfolgt im TDMA-Verfahren. Somit
ist sichergestellt, dass jeder TTP/C-Controller nur in dem ihm zugewiesenen
Intervall Nachrichten auf den Bus senden kann. Ein im TTP/C-Controller enthaltener
Bus-Wächter (Abb. 6‑24 : Funktionsprinzip
des Buswächters [1]
) stellt diese Übertragung sicher. Somit wird auch eine Überlastung des
Busses durch einen „Babbling Idiot“ vermieden.
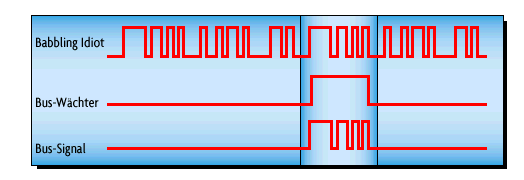
Abb. 6‑24 : Funktionsprinzip
des Buswächters [1]
Um die Forderung nach Fehlersicherheit zu erfüllen,
können zwei TTP/C-Controller, A und B parallel betrieben werden. Die beiden
Controller bilden zusammen eine sogenannte fehlertolerante Einheit (FTU). Da
die Nachrichtenübertragung zudem über zwei redundante Busse erfolgt, ist diese
somit vierfach redundant vorhanden.
Jeder Busteilnehmer eines TTP/C-Netzwerks hat
einen lokalen Membership-Vektor mit der Membership-Information für jeden
anderen Busteilnehmer. Dadurch ist Fehlererkennung sowohl im Sender als auch
im Empfänger möglich, weil jedem Knoten alle Empfangszeitpunkte bekannt sind.
Kommt eine Nachricht nicht in dem angegebenen Zeitfenster an, so wird ein Fehler
erkannt [3]. Alle Komponenten überprüfen kontinuierlich ihren Zeit- und Wertebereich
selbst. Erkennt diese Komponente dabei eine Abweichung vom vorgegebenem Ablauf,
so muss sich diese Komponente nach außen still verhalten (Fail-Silent)
[2].
Fehlererkennung im Wertebereich wird
durch die CRC-Kalkulation über den C-State, den Nachrichten-Header und die Nachricht
selbst realisiert.
Es gibt zwei verschiedene mögliche Systemkonfigurationen:
Bei Verwendung der Bus Konfiguration hat jeder
Knoten seinen eigenen Buswächter, so dass ein Schreibzugriff auf den Bus nur
zu in der MEDL definierten Zeitpunkten möglich ist. Diese Konfiguration garantiert
eine kollisionsfreie Kommunikation.
Bei der Stern-Konfiguration wird ein zentraler
Buswächter verwendet. Jeder der zwei Übertragungskanäle hat dabei einen zentralen
Buswächter. Durch die Stern-Konfiguration kann eine Aufbereitung der Bussignale
durchgeführt werden. Ein weiterer Vorteil der Stern-Konfiguration ist, dass
bei Zerstörung eines Knotens, z.B. durch Feuer, der Buswächter nicht betroffen
ist, da dieser sich dezentral an einem anderen Ort befindet und somit den defekten
Knoten abschalten kann [6].
Ein weiterer wichtiger Aspekt ist die Zusammensetzbarkeit von verschiedenen Knoten.
Ist Zusammensetzbarkeit gegeben, so können die einzelnen Komponenten des Systems
unabhängig voneinander entwickelt und getestet werden. Zudem können an einem
Steuergerät Änderungen durchgeführt werden, ohne dass diese einen Einfluss auf
die anderen Komponenten des Systems haben.
Mit TTP/C wird es ermöglicht, jeden Knoten
einzeln gegen das CNI zu testen. Zusammensetzbarkeit wird garantiert und ermöglicht
es so, Zeitaufwand und Kosten für Test- und Systemintegration drastisch zu senken.
TTP/C unterstützt auch das Senden von ereignisgesteuerten
Nachrichten. Dafür ist eine vorher spezifizierte Anzahl von Bytes in einer Nachricht
für ereignisgesteuerte Nachrichten vorzusehen. Mit diesen reservierten Bytes
kann ein ereignisgesteuertes Protokoll, wie z.B. CAN, so verwendet werden, dass
der Knoten, der auf den Bus senden kann, Nachrichten nach CAN-Standard übermitteln
kann. Die CAN-Software kann dabei mit nur geringen Änderungen verwendet werden.
Dieser Modus stört dabei das TTP/C-Protokoll in keiner Weise [6].
Die Robustheit des TTP/C-Netzwerkes wird durch
eine Verkabelung entsprechend der CAN-Spezifikation , durch Manchester Codierung
und durch spezielle Hardware, wie z.B. High Speed CAN-Treiber mit integrierter
Fehlertoleranz [3].
TTP/A ist die kostengünstige Variante des TTP/C,
erfüllt aber auch nicht die harten Echtzeitbedingen der Class C. TTP/A ist ein
Master-Slave-UART-basiertes Protokoll in dem der Master- der zugleich ein Teilnehmer
am TTP/C-Bus ist- den Zeittakt vorgibt [1]. Der Master spricht über Polling
die einzelnen Slaves an. Die Slaves antworten nur, wenn das von Ihnen gefordert
wird. Die Kommunikation zwischen den Slaves kann nur über den Master stattfinden.
Der FlexRay-Bus bietet, ebenso wie TTP eine
deterministische Nachrichtenübertragung, wie auch eine Uhren-Synchronisation,
aber der Controller bewirkt keine Nachrichten-Konsistenz, die dafür sorgt, dass
alle Knoten wissen, ob Nachrichten angekommen sind oder nicht. Dieser sogenannte
„Membership-Service“ muss bei FlexRay per Middleware vom Anwender programmiert
werden [7]. Da davon aber die Sicherheit des gesamten Systems abhängt, ist es
gefährlich, diesen Service für jede Anwendung neu zu entwickeln.
Tabelle der wichtigsten Merkmale (pdf)
Literatur
[1] Poledna, S.; Stöger, G.; Schlatterbeck, R.; Niedersüß, M.: Sicherheit
auf vier Rädern; Elektronik 10/2001
[2] Dilger, E.; Führer, T.; Müller, B.; Poledna,
S.; Thurner, T.: X-by-Wire: Design von verteilten, fehlertoleranten und sicherheitskritischen
Anwendungen in modernen Kraftfahrzeugen; www.vmars.tuwien.ac.at/projects/xbywire/projects/new-vdifinal.html
[3] Specification
of the TTP/C Protocol; www.tttech.com/specrequest.shtml
[4] Poledna, S.; Kroiss, G.: TTP: “Drive by
Wire” in greifbarer Nähe; Elektronik 14/99
[5] Poledna,
S.; Ettlmayr, W.; Novak, M.: Communication Bus for Automotive Applications
[6] Kopetz,
H.: A Comparison of TTP/C and FlexRay; TU Wien Research Report 2001/10
[7] Klasche, G: TTP und FlexRay: Wann kommt die Einigung? Elektronik Automotive September 2001