Mit der zunehmenden Menge
von Datenkommunikation zwischen den elektronischen Steuereinheit (ECUs) des
Fahrzeugs, ist es wichtig eine hohe Datenrate zu erzielen. FlexRay lässt eine
Datenrate von ungefähr 10Mbit/sec zu. das Design des Protokolls erlaubt jedoch,
dass viel höhere Datenraten erzielt werden können.
FlexRay, als skalierbares Kommunikationssystem, erlaubt die synchrone und
asynchrone Übertragung von Daten. Abhängig von den Anforderungen der jeweiligen
Applikation, kann die Kommunikationsschleife synchron, asynchron oder eine Mischung
von beiden sein. Die synchrone Datenübertragung ermöglicht die zeitgesteuerten
Kommunikation, die den Anforderungen von sicherheitsrelevanten Systemen entspricht.
Die asynchrone Übertragung basiert auf den Grundlagen des Byteflight™ Protokolls,
und lässt jeden Knotenpunkt die volle Bandweite für Event gesteuerte Kommunikationen
verwenden.
FlexRays synchrone, deterministische Datenübertragung hat eine garantierte
minimale Meldungslatenzzeit und Meldungschwankung. FlexRay unterstützt Redundanz
und eine fehlertolerante verteilte Uhrensynchronisierung für eine globale Zeitbasis.
Somit werden die Zeitpläne aller Netzknoten
innerhalb eines vorbestimmten engen Präzisionsfenster gehalten.
FlexRay ist ein herstellerübergreifendes Bussystem
für Highspeed-Anwendungen.
Das FlexRay Protokoll ist eine Kombination von
dem Byteflight™ (BMW1999) Protokoll
und TTP/C. Byteflight™ wurde ursprünglich für passive Sicherheitssysteme wie
Airbags entwickelt, in denen kurze Reaktionszeiten gefordert werden. Es ist
jedoch nicht für aktive Kontrollsysteme geeignet da eine Fehlertoleranz nicht
unterstützt wird. Für X-by-Wire Systeme ist die Fehlertoleranz eines Systems
jedoch eine wichtige Vorraussetzung.
Das FlexRay Konsortium zwischen BMW und DaimlerChrysler
wurde gegründet um das Byteflight™ Protokoll von BMW dahingehend weiterzuentwickeln, um es für X-by-wire
Systeme tauglich zu machen. FlexRay zielt mit seiner Datenrate mit bis zu 10Mbits/s
auf Applikationen wie X-by-Wire oder Powertrain ab, die ein deterministisches
und fehlertolerantes Kommunikationssystem benötigen und wird frei verfügbar
sein.
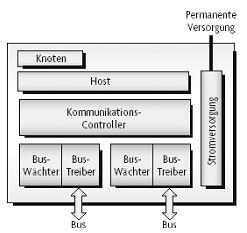
Auf der Hardwareseite lassen sich bis 64 Knoten verbinden. Jeder Knoten besitzt einen Host mit einem Kommunikations-Controller. Ein oder zwei Bustreiber und Buswächters können an diese angeschlossen werden und alle Komponenten sind über eine Spannungsversorgung (Fahrzeugbatterie) gekoppelt. Der Kommunikations-Controller ist das Herzstück von FlexRay. Er regelt den Datenfluss zwischen Host und Bus nach dem FlexRay Protokoll und erzeugt die globale Uhrzeit.
Abb. 6‑25: Abbildung eines Knotens
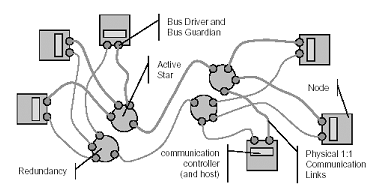
Abb. 6‑26 : Netzkonfiguration mit aktiven Stern
Der Kommunikations-Controller kann entweder über zwei redundante Kanäle
Daten senden und empfangen oder nur mit einem physikalischen Kanal verbunden
sein (Abb. 6-20). Die Kommunikationsschnittstelle zwischen dem Kommunikations-Controller
und dem Host Computer ist das Kommunikations- Network Interface (CNI).
Jedes zeitgesteuerte Protokoll, wie FlexRay,
benötigt dynamische Konfigurationsdaten, die vor Inbetriebnahme, in den Kommunikationscontroller
geschrieben werden müssen. FlexRay minimiert diese Daten, indem viele der Parameter
vorab im Protokoll festgesetzt sind. Es gibt drei Schnittstellentypen: Steuerparameter,
Online-Steuerung und Online-Daten.
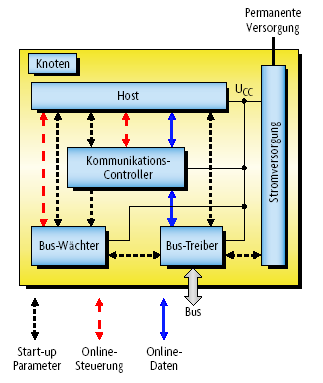
Abb. 6‑27 : Schnittstellen zwischen den einzelnen
Bausteinen [5]
Die Kommunikation läuft im Rahmen eines Kommunikationszyklus.
FlexRay teilt die Zeit in zwei parallele wiederkehrende Intervalle, einen synchronen
statischen Kanal für die zeitgesteuerten Nahrichten und einen asynchronen dynamischen
Kanal für die Event-gesteuerten Nachrichten. Die Anteile dieser können flexibel
festgelegt werden, wobei auch ein Teil leer sein kann. Somit gibt es drei mögliche
Zykluskonfigurationen (statisch, gemischt (min. 2 statische Slots) und dynamisch).
Der Kommunikationszyklus
beginnt mit einem SYNCSymbol. Die Zeit-Slots werden durch die ID-Nummern identifiziert,
die sowohl im statischen wie auch im dynamischen Teil benutzt werden.
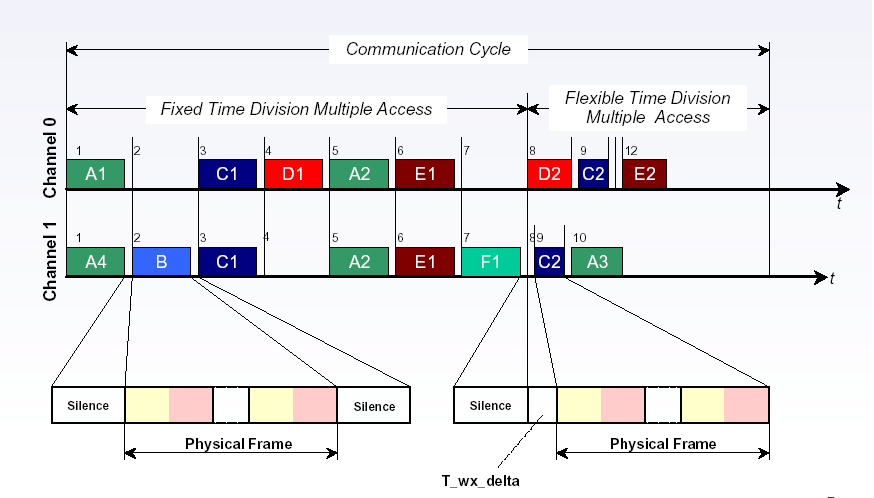
Abb. 6‑28 : Kommunikationszyklus [10]
Die statischen Slots sind für Nachrichten hoher
Priorität reserviert. Der Buszugriff erfolgt nach dem TDMA Verfahren (Time Division
Multiple Access) für die Übertragung von zeitgesteuerten Nachrichten. Der Übertragungszyklus
besteht aus einer frei konfigurierbaren Anzahl von Sende-Slots identischer Länge.
Netzknoten die mit beiden Kanälen verbunden sind senden ihre Nachrichten synchron
auf beiden Kanälen. Wird eine Nachricht nicht gesendet, verstreicht die entsprechende
Zeit ungenutzt. Die Länge und der Inhalt der einzelnen Nachrichten können sich
unterscheiden.
Jeder Teilnehmer erhält dieselbe Priorität, woraus
sich der Vorteil ergibt, dass berechenbar und vorhersagbar ist, wann eine Nachricht
gesendet oder empfangen werden kann. Dabei weiß jeder Busteilnehmer a priori
die Intervalle, die er nutzen darf, wodurch eine Kollision automatisch ausgeschlossen
wird.
Das
Protokoll enthält eine fehlertolerante Uhrensynchronisation und schütz die Kommunikationskanäle
vor „Babbling Idiots“ über einen Buswächter. Die Nachsynchronisation der Uhren
ist Watchdog-überwacht. FlexRay bietet seit neuestem einen skalierbaren, erweiterten
statischen Datenframe mit bis zu 254 Bytes.
Weniger wichtige „asynchrone“ Nachrichten
werden im dynamische Teil gemäss der Byteflight™ Spezifikation übertragen. Seine Slots sind variabel und es kann
Unterschiede in den Zeit-Slots auf den
zwei Kanälen geben.
Diese Flexibilität erhöht die Übertragungsrate
von FlexRay beträchtlich. Die Slot Zähler werden synchron hochgezählt und der
Buszugriff folgt über das FTDMA Verfahren (Flexible Time Division Multiple Access),
bei der die Einzelkanäle innerhalb einer verfügbaren Bandbreite
auf einen Teilbereich dieser Bandbreite zugreifen.
Bei einer Datenübertragung werden für die Dauer der Übertragung die
Slotzähler auf dem aktuellen Wert gestoppt. Kollisionsfreie Zugriffmechanismen
steuern den Sendevorgang.
Das Nachrichtenformat ist im statischen wie im
dynamischen Teil identisch.
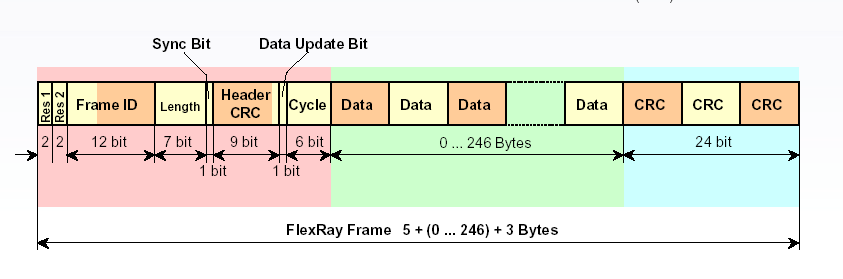
Abb. 6‑29 : Frame Format
mit Cycle Counter[10]
|
Frame ID: |
Identifier, 10 Bit, Wertebereich: (110
... 102310), definiert die Slotposition
im statischen Teil und die Priorität im dynamischen Teil. Ein kleinerer
Identifier bestimmt eine höhere Priorität. ID = 0 ist für das SYNC-Symbol
reserviert. Ein Identifier darf in einem Netzwerk nur einmal verwendet
werden. Jeder Knoten kann einen oder mehrere Identifier – sowohl im statischen
als auch im dynamischen Teil – verwenden.
|
|
SYNC:
|
SYNC-Feld, 1 Bit.
Dieses
Bit zeigt an, ob die Nachricht zur Uhrensynchronisierung verwendet wird
und ob das erste Datenbyte den Zykluszähler enthält. (SYNC = “1”: Botschaft
mit Frame-Counter und Uhrensynchronisation, SYNC = “0”: Botschaft ohne
Frame-Counter)
|
|
LENGTH:
|
Längen-Feld, 4 Bit, Anzahl
der Datenbytes (010 ... 1210).
Ein Wert größer 12 wird als LEN=12 interpretiert. Bei Nutzung des Zykluszählers
(SYNC=1) wird bei einem Wert größer 11 LEN=11 gesetzt.
|
|
CYCLE:
|
Das CYCLE-Feld kann als Zykluszähler oder als erstes
Datenbyte genutzt werden. Der Zykluszähler wird am Anfang
eines jeden Kommunikationszyklus in allen Kommunikationscontrollern synchron hochgezählt.
|
|
D0 … D246:
|
Daten Bytes, 0 – 246 Bytes |
|
CRC:
|
24 Bit Cyclic Redundancy Check.
|
Tabelle 6‑1 : Erläuterung zum Frame Format
Um den richtigen Sendepunkt ermitteln zu können,
ist eine verteilte Zeitbasis mit regelmäßiger Uhrensynchronisation durch die
Kommunikations-Controller der einzelnen Knoten notwendig. Um die Uhrensynchronisation
zu garantieren, werden hierfür jedoch nur Nachrichten von Netzknoten verwendet
die an beiden Kanälen angeschlossen sind. Zusätzlich werden nur ausgesuchte
Nachrichten aus dem statischen Teil verwendet. Die Uhrensynchronisation ist
aktiv, sobald mindestens zwei Knoten aktiv sind.
In den veröffentlichten FlexRay Dokumenten ist keine Fehler-Hypothese oder
Never-give-up Strategy spezifiziert. Im Falle eines physikalischen Fehlers eines
Knotens ist durch die fehlende Nachrichtenkonsistenz, die dafür Sorgen würde
dass alle Knoten den Systemstatus kennen, kein Vorgehensweise spezifiziert worden.
Der Buswächter befindet sich schließlich in dem fehlerhaften Knoten. FlexRay
benutz den Welch-Lyn Algorithmus, bei dem Zeitunterschiede wahrscheinlich in
der Art und Weise von TTA detektiert werden. Da das FlexRay Netzwerk nicht über
verteilte Membership-Informationen im Protokoll verfügt, erlangen fehlerhafte
Knoten eine übermäßige Wichtigkeit in dem Algorithmus der Uhrensynchronisation.
Es ist nicht bekannt wie das FlexRay-Protokoll sicherheitskritische Ereignisse
behandelt. Eine mögliche Lösung dieses Problems, wäre die Einführung eines Membership
Protokolls auf Applikationsebene, die jedoch individuell vom Anwender programmiert
werden müsste und somit eine umfangreichere HostSoftware zur Folge hätte.
Ein wichtiger Aspekt ist die Zusammensetzbarkeit
verschiedener Knoten. Durch das Byteflight™ Protokoll ist es unmöglich die temporären
Eigenschaften von Verbindungskomponenten unabhängig von dem globalen Inhalt
der Applikation zu definieren. Zusammensetzbarkeit ist demnach nicht gegeben.
Tabelle der wichtigsten Merkmale (pdf)
[1]
FlexRay Overview, Advanced Automotive Communication
System
[2]
Klasche, G: TTP und
FlexRay: Wann kommt die Einigung? Elektronik Automotive September 2001
[3]
Kopetz,
H.: A Comparison of TTP/C and FlexRay; TU Wien Research Report 2001/10
[4]
FlexRay-Homepage, www.flexray-group.com
[5]
FlexRay für verteilte
Anwendungen im Fahrzeug, Elektronik Automotive, Mai 2001
[6]
Dr. Schedl, A., Lohrmann,
P. :Anforderungen an ein zukünftiges Bussystem für fehlertolerante Anwendungen
aus Sicht Kfz-Hersteller, VDI 17.10.2000
[7]
Wengenmayr, R. :
FlexRay – ein neuer Datenbus für Autos entsteht, Technische Rundschau Nr.18
2001
[8]
Weiter verbessert,
Design&Elektronik 03/2002
[9]
Fuchs, E. : FlexRayTM
Requirements Specification, Version 1.9.7, 7.Sept. 2001
[10]
Bogenberger, F. : FlexRay, and where it stands today
(02AE-41), SAE World Congress März 2002